CAN总线是现代汽车电子系统的核心通信协议,是保障整车电子设备协同运行的“神经网络”。
为助力相关从业者备战面试,精准掌握CAN总线核心知识点,本文整理11道高频面试题及标准解答,涵盖概念、物理层、帧结构等关键内容,条理清晰、重点突出,可快速夯实考点、从容应对面试考核。
-------------------汽车嵌入式学堂-------------------
面试题1:请详细解释CAN总线的基本概念及其在汽车电子系统中的核心价值
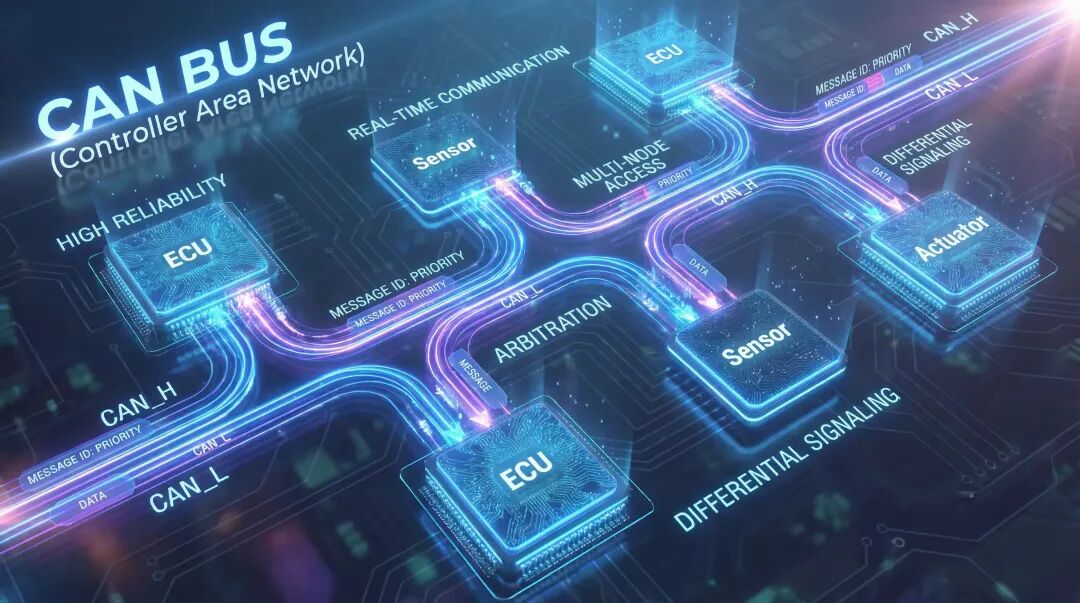
CAN总线(Controller Area Network,控制器局域网)是一种专门为汽车环境设计的串行通信协议,由德国博世公司于20世纪80年代开发,后成为ISO 11898-1国际标准。它是一种多主、异步、基于消息的通信系统,采用非破坏性总线仲裁机制解决多节点同时访问冲突问题。
在汽车电子系统中,CAN总线的核心价值体现在:
1. 减少线束复杂度:传统汽车中,ECU间点对点连接需要大量线束,而CAN总线通过双绞线(CAN_H和CAN_L)实现多节点互联,显著降低线束重量和成本。
2. 提高系统可靠性:CAN采用差分信号传输(CAN_H和CAN_L的电压差),具备优异的抗电磁干扰能力,符合汽车恶劣电磁环境要求。
3. 实时性保障:通过11位或29位标识符实现消息优先级排序,关键信息(如刹车信号)可优先传输,确保实时性。
4. 分布式架构支持:支持多达127个节点,实现分布式控制系统,各ECU既可独立工作又能协同处理复杂任务。
现代汽车通常采用多CAN总线架构,如动力系统CAN(高速500kbps)和车身系统CAN(低速125kbps),形成分层次的网络拓扑结构,满足不同子系统对实时性和带宽的需求。随着汽车电子化程度提高,CAN总线已成为现代汽车电子电气架构不可或缺的"神经网络"。
面试题2:请详细描述CAN总线的物理层特性,包括信号电平、终端电阻和总线拓扑结构
CAN总线的物理层特性对系统可靠性至关重要,主要包括以下方面:
1. 差分信号电平
CAN总线采用双绞线传输差分信号,定义了两种逻辑状态:
显性电平(Dominant):CAN_H ≈ 3.5V,CAN_L ≈ 1.5V,差分电压约2V;
隐性电平(Recessive):CAN_H ≈ CAN_L ≈ 2.5V,差分电压约0V。
显性电平具有"线与"特性,即只要有一个节点发送显性电平,总线就呈现显性状态。
2. 终端电阻
CAN总线必须在两端各安装一个120Ω的终端电阻,用于阻抗匹配和信号反射抑制:
- 首端和末端ECU各包含一个120Ω电阻;
- 总线等效电阻为60Ω(两个120Ω电阻并联);
- 终端电阻缺失会导致信号反射,增加通信错误率。
3. 总线拓扑结构
CAN总线支持多种拓扑结构:
- 线性总线型:最常见结构,所有节点连接在一对双绞线上;
- 星型拓扑:通过CANcentrate/ReCANcentrate等网关实现,提高容错性;
- 混合拓扑:现代汽车中常见的多总线混合架构。
4. 电气特性
- 支持最高1Mbps的传输速率(短距离);
- 最远传输距离可达1km(低速时);
- 双绞线绞合比建议控制在1:1.5~1:4之间,抑制电磁干扰。
这些物理层设计确保了CAN总线在汽车恶劣电磁环境下的可靠通信,是汽车电子系统稳定运行的基础保障。
面试题3:请详细分析CAN数据链路层的帧结构,包括标准帧和扩展帧的组成及各字段作用
CAN数据链路层的帧结构是确保可靠通信的核心机制,根据不同应用场景分为标准帧和扩展帧两种格式:
1. 标准帧(CAN 2.0A)结构
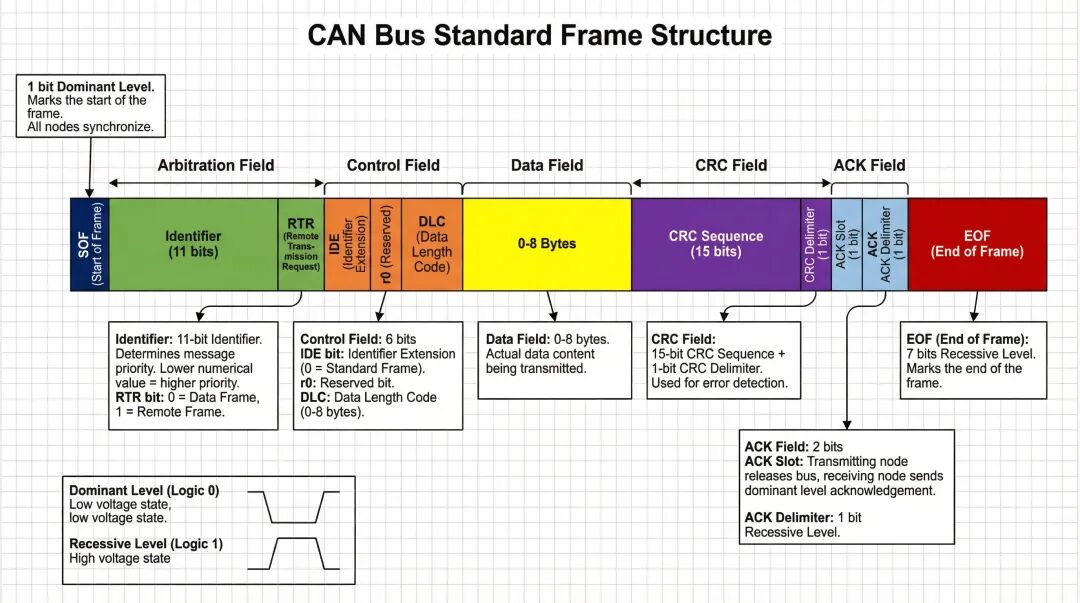
帧结构依次为:帧起始(SOF) | 仲裁场 | 控制场 | 数据场 | CRC场 | 应答场 | 帧结束(EOF)
- 帧起始(SOF):1位显性电平,标志帧开始,所有节点同步。
- 仲裁场:11位标识符 + RTR位;标识符决定消息优先级,数值越小优先级越高;RTR位:远程传输请求位,0表示数据帧,1表示远程帧。
- 控制场:6位;IDE位:标识符扩展位(0表示标准帧);r0保留位;DLC位:数据长度码(0-8字节)。
- 数据场:0-8字节,实际传输的数据内容。
- CRC场:15位CRC序列 + 1位CRC界定符,用于错误检测。
- 应答场:2位;应答槽:发送节点释放总线,接收节点发送显性电平应答;应答界定符:1位隐性电平。
- 帧结束(EOF):7位隐性电平,标志帧结束。
2. 扩展帧(CAN 2.0B)结构
帧结构依次为:帧起始(SOF) | 仲裁场(29位) | SRR位 | IDE位 | 控制场 | 数据场 | CRC场 | 应答场 | 帧结束(EOF)
- 仲裁场扩展为29位标识符(11位基本ID + 18位扩展ID);
- 增加了SRR位(替代远程请求位)和IDE位(标识符扩展位)。
3. 帧间空间
用于分隔连续帧,包含3位隐性电平和可变长度的总线空闲状态;发送错误后的帧间空间会延长(错误被动节点)。
4. 实际应用示例
在汽车车身控制系统中,典型CAN帧如左前门控制器状态帧:标识符:0x770(7位二进制:1110110),数据长度:8字节,包含车门状态、车窗位置、后视镜调节等信号。
这种精巧的帧结构设计使CAN总线能在保证实时性的同时提供高可靠性,是汽车电子系统通信的基础。
面试题4:请详细解释CAN总线的非破坏性总线仲裁机制及其对系统实时性的影响
CAN总线的非破坏性总线仲裁机制是其核心创新,解决了多节点同时访问总线时的冲突问题,同时保证了高优先级消息的实时传输:
1. 仲裁原理
仲裁过程在帧的仲裁场进行,采用"逐位比较"方式:
- 所有节点同时发送仲裁场(标识符+RTR位);
- 节点持续监测总线电平与自己发送的电平是否一致;
- 若发送显性电平而监测到隐性电平(表示其他节点发送了更高优先级消息),则停止发送并转为接收状态;
- 最后留在总线上的节点即为获胜者,可继续完成数据传输。
2. 优先级决定因素
- 标识符数值越小,优先级越高;
- 标准帧优先级高于扩展帧(相同ID情况下);
- 数据帧优先级高于远程帧。
3. 实时性保障机制
- 零丢失仲裁:低优先级节点不会因冲突而丢失数据,只是延迟发送;
- 确定性延迟:高优先级消息的最大延迟可计算,满足实时系统要求;
- 公式计算:消息最大响应时间R = C + J + B + I,其中:C为最小传输时间,J为抖动,B为低优先级信息等待时间,I为高优先级干扰时间。
4. 实际应用影响
在汽车控制系统中,关键安全信息(如刹车信号)使用高优先级标识符(如0x180),确保刹车信号可在0.3ms内被所有节点接收,即使在总线高负载情况下,也能优先传输。典型应用场景:ABS、ESP等安全关键系统。
这种仲裁机制使CAN总线成为汽车电子系统中实时性要求最高的通信方式,特别适合安全关键应用。
面试题5:请详细说明CAN总线的位填充机制和CRC校验原理,及其在错误检测中的作用
CAN总线通过位填充和CRC校验两种机制确保数据传输的可靠性,这两种机制协同工作,形成强大的错误检测能力:
1. 位填充机制
目的:防止因连续相同电平导致接收方失去同步。
规则:
- 发送方在连续发送5位相同电平后,自动插入1位相反电平;
- 接收方检测到连续5位相同电平后,自动删除下1位;
- 帧起始(SOF)、仲裁场、控制场、CRC序列、ACK场、EOF均执行位填充;
- 数据场中若出现6位连续相同电平,则视为错误。
示例:连续发送101111,实际传输为1011110(填充0)。
2. CRC校验原理
CRC计算:采用15位CRC多项式x¹⁵+x¹⁴+x¹⁰+x⁸+x⁷+x⁴+x³+1;
计算范围:从帧起始到数据场结束的所有位(不包括填充位);
校验过程:
- 发送方计算CRC值,附加到数据场后;
- 接收方独立计算CRC值并与接收到的CRC比较;
- 若不匹配,则发送错误帧。
CRC优势:可检测所有奇数位错误、突发错误(≤15位)和大部分突发错误(>15位)。
3. 错误检测协同机制
- 位填充错误:检测到6位连续相同电平,触发错误帧;
- CRC错误:接收CRC不匹配,触发错误帧;
其他错误检测:
- 位错误:发送位与监测位不一致;
- 填充错误:违反位填充规则;
- 形式错误:固定格式位错误;
- 应答错误:应答槽未收到应答。
4. 错误处理流程
- 检测到错误的节点发送错误帧(6位显性电平);
- 所有节点丢弃当前帧;
- 发送错误帧的节点根据错误计数器状态采取:错误主动节点重发帧,错误被动节点等待总线空闲后再尝试。
这些机制共同确保CAN总线在汽车恶劣环境下的高可靠性,误码率可控制在10⁻¹¹以下。
面试题6:请详细解释CAN总线的错误处理机制和故障界定规则,以及它们如何保证系统可靠性
CAN总线通过精密的错误处理和故障界定机制,在保证系统可靠性的同时避免单个节点故障影响整个网络:
1. 错误检测机制
CAN总线通过五种错误检测机制确保数据完整性:
- 位错误:节点发送位与监测位不一致;
- 填充错误:违反位填充规则(连续6位相同电平);
- CRC错误:接收CRC与计算CRC不匹配;
- 形式错误:固定格式位错误(如SOF、EOF等);
- 应答错误:应答槽未收到应答。
2. 错误处理流程
当检测到错误时,节点执行以下步骤:
- 发送错误帧(6位显性电平);
- 发送错误界定符(8位隐性电平);
- 根据节点状态采取不同行动:
错误主动节点(Error-Active):立即重发被中止的帧;
错误被动节点(Error-Passive):等待总线空闲后发送,且只能发送隐性电平;
总线关闭节点(Bus-Off):不再参与总线通信。
3. 故障界定规则
每个节点维护两个错误计数器:发送错误计数器(TEC)(记录发送错误次数)和接收错误计数器(REC)(记录接收错误次数)。状态转换规则:
- 错误主动状态:TEC < 128 且 REC < 128,检测到错误时发送主动错误帧;
- 错误被动状态:TEC ≥ 128 或 REC ≥ 128,检测到错误时发送被动错误帧,需等待128个11位空闲帧才能恢复主动状态;
- 总线关闭状态:TEC ≥ 256,节点不再参与总线通信,需通过硬件复位或128个11位空闲帧恢复。
4. 系统可靠性保障
- 故障隔离:单个节点故障不会导致整个网络瘫痪;
- 自动恢复:临时性故障可自动恢复;
- 错误统计:通过错误计数器监控网络健康状况;
- 容错设计:关键系统采用双CAN通道冗余。
在实际汽车应用中,这种机制确保了即使某个ECU出现故障,其他系统仍能正常工作,提高了整车安全性。
面试题7:请详细说明CAN总线在汽车电子系统中的典型应用场景,并分析不同应用对总线特性的要求
CAN总线作为汽车电子系统的"神经网络",在不同应用场景中发挥关键作用,根据应用需求可分为以下几类:
1. 动力传动系统CAN(高速CAN)
应用场景:发动机控制、变速箱控制、ABS/ESP等;
总线特性:波特率500kbps,优先级最高(安全关键),实时性要求≤5ms响应时间;
典型帧:发动机转速、扭矩需求、刹车信号等;
设计考虑:关键信号(如刹车)使用高优先级ID(0x180),采用双通道冗余设计确保安全。
2. 底盘系统CAN
应用场景:转向控制、悬挂控制、胎压监测;
总线特性:波特率125-250kbps,实时性10-20ms响应时间;
典型帧:转向角度、悬挂高度、胎压数据;
设计考虑:与动力系统CAN通过网关互联,需要精确的时间同步。
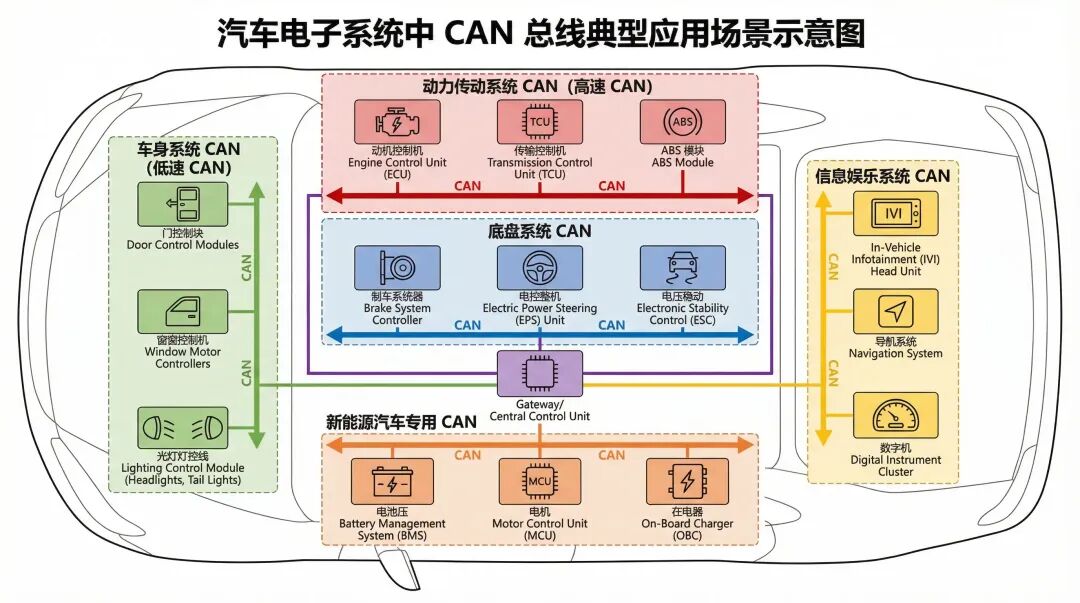
3. 车身系统CAN(低速CAN)
应用场景:车窗控制、门锁、座椅调节、灯光控制;
总线特性:波特率125kbps,实时性50-100ms响应时间;
典型帧:车门状态、车窗位置、灯光控制信号;
设计考虑:成本敏感,可采用单线制部分节点,支持远程唤醒功能。
4. 信息娱乐系统CAN
应用场景:音响、导航、车载通信;
总线特性:波特率100kbps,实时性100-500ms响应时间;
典型帧:音频数据、导航指令;
设计考虑:与其他系统隔离,避免干扰,支持大数据量传输。
5. 新能源汽车专用CAN
应用场景:BMS、充电控制、电机控制;
总线特性:波特率500kbps(动力)+ 250kbps(充电),实时性要求精确的电池状态监测;
典型帧:电池电压、电流、温度、SOC;
设计考虑:需要高精度采样和实时控制,支持快充和大电流通信。
不同应用场景对CAN总线的实时性、可靠性、带宽要求不同,现代汽车通常采用多CAN总线架构,通过网关互联,形成分层次的网络拓扑结构。
面试题8:请详细分析CAN总线的网络拓扑结构设计原则,并比较线性总线和星型拓扑的优缺点
CAN总线的网络拓扑结构设计直接影响系统的可靠性、可维护性和扩展性,需根据应用场景选择合适的拓扑方案:
1. 网络拓扑设计原则
- 阻抗匹配:确保总线两端各有一个120Ω终端电阻,避免信号反射;
- 分支长度控制:分支长度应小于0.3米,减少信号干扰;
- 双绞线规范:使用双绞线,绞合比1:1.5~1:4,抑制电磁干扰;
- 节点布局:按功能区域分组,减少总线长度;
- 负载率控制:总线负载率应低于70%,确保实时性。
2. 线性总线拓扑
结构:所有节点连接在一对双绞线上,形成线性结构;
优点:结构简单,成本低;易于扩展,只需接入总线;无需额外设备;
缺点:单点故障可能导致整个网络瘫痪;分支过长会增加信号衰减;故障定位困难;
适用场景:简单车身系统、非关键系统。
3. 星型拓扑
结构:通过CANcentrate/ReCANcentrate等网关实现星型连接;
优点:故障隔离,单个节点故障不影响其他节点;易于维护,可单独断开故障节点;支持混合电压等级;
缺点:成本较高,需要专用网关;增加系统复杂度;可能引入单点故障(网关故障);
适用场景:安全关键系统、高可靠性要求场合。
4. 混合拓扑结构
现代汽车通常采用混合拓扑:
- 域控制器架构:按功能域划分(动力域、底盘域、车身域等);
- 网关互联:各域通过中央网关互联;
总线类型选择:高速CAN(500kbps)用于动力系统,中速CAN(125-250kbps)用于底盘系统,低速CAN(125kbps)用于车身系统。
5. 实际应用案例
典型车身CAN网络设计:中央控制器作为主节点,四个门控制器作为从节点,采用线性拓扑,分支长度控制在0.2米以内,总线长度不超过5米。
合理的拓扑设计是CAN总线系统可靠运行的基础,需根据应用场景在成本、可靠性和可维护性之间取得平衡。
面试题9:请详细分析CAN总线的波特率与传输距离的关系,以及实际应用中的选择策略
CAN总线的波特率与传输距离之间存在密切关系,这种关系受限于信号衰减和时序要求,在实际应用中需要根据系统需求进行合理选择:
1. 波特率与距离的关系
物理限制:信号衰减随距离增加而增大,可能导致信号失真;时序容差:位时间误差随距离增加而累积;
典型关系:
- 1Mbps:最远40米(短距离高速通信);
- 500kbps:最远100米(动力系统常用);
- 250kbps:最远250米(中等距离);
- 125kbps:最远500米(长距离低速通信);
- 10kbps:最远1000米(超长距离)。
2. 位时间参数配置
波特率由位时间参数决定,包括:
- 同步段(Sync_SEG):固定1位时间,用于同步;
- 时间段1(BS1):用于采样,可编程1-16位时间;
- 时间段2(BS2):用于信息处理,可编程1-8位时间;
- 采样点:通常设在75%-87.5%位时间位置;
计算公式:波特率 = 1 / (Tq × (1 + BS1 + BS2)),其中Tq为时间量子,由系统时钟分频得到。
3. 实际应用选择策略
- 动力系统:波特率500kbps,距离通常<5米(ECU集中安装),原因是高实时性要求(<5ms响应);
- 底盘系统:波特率125-250kbps,距离5-20米,原因是中等实时性要求(10-20ms响应);
- 车身系统:波特率125kbps,距离10-40米,原因是低实时性要求(50-100ms响应);
- 新能源汽车BMS:波特率500kbps(动力总线)、250kbps(充电总线),原因是高精度电池状态监测需求。
4. 多总线架构设计
现代汽车通常采用多速率CAN总线架构:
- 网关功能:不同速率总线间通过网关互联;
- 路由策略:根据消息优先级和目的地选择路由;
- 时间同步:通过参考消息实现TTCAN时间同步。
5. 优化策略
- 总线分段:长距离总线可适当降低波特率;
- 中继器:必要时使用CAN中继器延长距离;
- 光纤转换:超长距离或高EMI环境可使用CAN转光纤。
合理选择波特率是CAN总线系统设计的关键,需在实时性、可靠性和成本之间取得平衡。
面试题10:请详细分析CAN节点的硬件组成,并解释各组件的功能和接口关系
CAN节点是汽车电子控制单元(ECU)的核心组成部分,其硬件设计直接影响通信性能和系统可靠性。典型CAN节点由以下组件构成:
1. 微控制器(MCU)
功能:节点的大脑,负责处理应用逻辑和通信协议;
关键特性:实时处理能力,满足汽车控制系统实时性要求;丰富外设,定时器、ADC、PWM等;低功耗设计,支持睡眠/唤醒模式;
接口关系:通过内部总线与CAN控制器连接;通过GPIO与传感器和执行器连接。
2. CAN控制器
功能:实现CAN协议的硬件模块,处理帧的收发和仲裁;
关键特性:协议处理,自动处理帧封装、CRC计算、位填充;缓冲区,多个发送/接收缓冲区;中断机制,支持多种中断源;
接口关系:通过专用接口与MCU连接(如SPI、并行总线);通过CAN_TX/CAN_RX引脚与收发器连接。
3. CAN收发器
功能:连接CAN控制器与物理总线,实现电平转换;
关键特性:电平转换,将MCU的TTL电平转换为差分信号;差分驱动,增强抗干扰能力;保护功能,总线短路、过压保护;
接口关系:通过CAN_TX/CAN_RX与CAN控制器连接;通过CAN_H/CAN_L与总线连接。
4. 电源管理单元
功能:为整个节点提供稳定电源;
关键特性:电压调节,将汽车电池电压(9-16V)转换为MCU所需电压(3.3V/5V);电源监控,监测电压状态,支持低电压检测;睡眠/唤醒控制,支持低功耗模式;
接口关系:连接汽车电源系统;为所有组件提供电源。
5. 存储器
功能:存储程序代码、配置数据和标定参数;
类型:Flash存储程序代码和标定数据;RAM存储运行时数据;EEPROM存储需要掉电保存的配置;
接口关系:通过总线与MCU连接。
6. 调试接口
功能:支持程序下载和调试;
类型:JTAG/SWD用于MCU调试;OBD接口用于整车诊断;
接口关系:连接外部调试设备。
7. 实际应用示例
典型车门控制器CAN节点:MCU为NXP S12系列,CAN控制器集成在MCU中,收发器为TJA1050,电源管理为LM2596降压芯片,存储为256KB Flash + 32KB RAM。
本文围绕CAN总线核心知识点,设计并详解10道高频面试题,全面覆盖协议概念、物理层特性、帧结构、容错机制等关键内容,贴合汽车电子岗位面试需求。
整套题库条理清晰、解答规范,既可供从业者备考复习、夯实专业基础,也可作为日常工作中的参考资料。
掌握本文知识点,能有效提升面试竞争力,助力从业者在汽车电子领域稳步发展,更好地应对实际工作与面试中的各类相关问题。
-------------------汽车嵌入式学堂-------------------